| 产品特性:精准紧凑 | 是否进口:否 | 产地:广州 |
| 工作范围:动作范围 (°) 手臂旋转 (JT1) ±165 手臂前后 (JT2) +150 - ?90 手臂上 | 品牌:海川机器人 | 型号:BA006L |
| 关节数量:6 |

BA006L
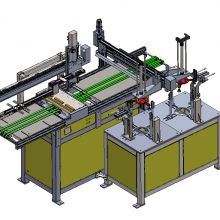
产品介绍:焊接通用机器人
特点:智能性、灵活性和高精度,焊接品质媲美焊接熟练工
应用:弧焊、点焊,搬运
产品详细
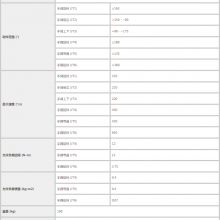
BA006L的规格
| BA006L的规格 | ||
| 手臂类型 | 多关节型机器人 | |
|---|---|---|
| 自由度 | 6 | |
| 负载能力 (kg) | 6 | |
| 臂展 (mm) | 2,036 | |
| 重复定位精度 (mm) ?1 | ±0.08 | |
| 动作范围 (°) | 手臂旋转 (JT1) | ±165 |
| 手臂前后 (JT2) | +150 - ?90 | |
| 手臂上下 (JT3) | +90 - ?175 | |
| 手腕旋转 (JT4) | ±180 | |
| 手腕弯曲 (JT5) | ±135 | |
| 手腕扭转 (JT6) | ±360 | |
| 速度 (°/s) | 手臂旋转 (JT1) | 210 |
| 手臂前后 (JT2) | 210 | |
| 手臂上下 (JT3) | 220 | |
| 手腕旋转 (JT4) | 430 | |
| 手腕弯曲 (JT5) | 430 | |
| 手腕扭转 (JT6) | 650 | |
| 允许负载扭矩 (N?m) | 手腕旋转 (JT4) | 12 |
| 手腕弯曲 (JT5) | 12 | |
| 手腕扭转 (JT6) | 3.75 | |
| 允许负载惯量 (kg?m2) | 手腕旋转 (JT4) | 0.4 |
| 手腕弯曲 (JT5) | 0.4 | |
| 手腕扭转 (JT6) | 0.07 | |
| 重量 (kg) | 160 | |
| 安装方式 | 地面, 悬挂 | |
| 安装条件 | 环境温度 (°C) | 0 - 45 |
| 相对湿度 (%) | 35 - 85 (无结露) | |
| 控制柜 / 所需电源 (kVA) | 型号 面向北美 | E01 / 5.6 |
| 型号 面向欧洲 | ||
| 型号 面向日本 & 亚洲 |
?1: 以ISO9283为基准。